本文利用Altair公司的MotionView & MotionSolve模块来建立自动换挡器的机构,模拟换挡过程中换挡力的变化曲线,为设计工程师进一步优化设计提供参考。
1 前言
汽车变速器将从动力装置获得的牵引力进行变换,改变发动机的转矩和转速,从而满足车辆、道路、驾驶人和环境的要求。换挡装置在人车接口方面发挥重要的作用,汽车变速器利用它来匹配速度比、可以利用的功率和绝大多数工况。换挡装置的设计对换挡舒适性具有显著的影响。本文利用Altair公司的MotionView & MotionSolve模块来建立自动换挡器的机构,模拟换挡过程中换挡力的变化曲线,为设计工程师进一步优化设计提供参考。
2 换挡器设计
乘用车常见的换挡器为机械换挡,适用于手动变速器(MT)和自动变速器(AT)。
手动变速器(MT)通常有5-6个挡位,重量轻,价格低。为了将变速器齿轮啮合到动力流中,手动换挡需要精确和平稳的换挡操纵杆,手动换挡过程一般由选挡和挂挡两部分组成。
自动变速器则取消了变速杆和离合器踏板,驾驶员仅需控制油门踏板,行驶过程中汽车自动完成换挡时刻的判断,实现收油门、离合器分离、选挡、换挡、离合器接合和回油门等动作。自动变速器中,变速器通过拉索或者电信号来获得驾驶员的意图。自动换挡器的设计必须遵循美国公路交通安全管理局(NHTSA)的两条重要安全法规:(1)FMVSS 102标准规定变速杆和显示方式,(2)114标准规定防盗装置和防止装自动变速器车辆非法使用或者驻车侧倾的法规。自动变速器的挡位一般分为P、R、N、D、M、M+、M-,其中P(Parking)为停车挡,R(Reverse)为倒挡,N(Neutral)为空挡、D(Drive)为前进挡,M(Manual)为手动模式,M+为手动模式进挡,M-为手动模式退挡。换挡器设计中,挡位定位机构的设计尤为重要,关乎换挡机构的各个挡位的定位和驾驶员的换挡手感。常用的定位机构有叶片弹簧式(Leaf Spring)、子弹头止动式(Detent Bullet)和滚珠止动式(Detent Roller)三种形式,如下图所示。
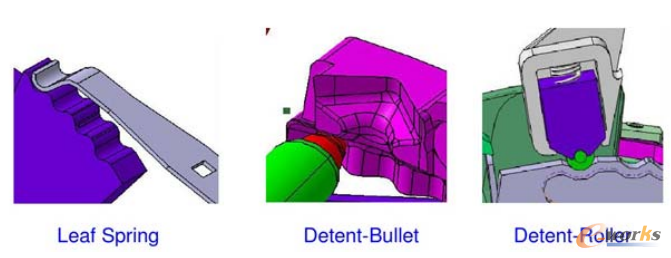
图1 常见的自动换挡器定位机构
本文以自动换挡器子弹头止动式(Detention Bullet)机构为例,建立多体动力学模型,模拟PRND换挡过程中换挡力的变化曲线。
3 多体动力学模型
虚拟样机技术VPT(Vitual Prototyping Technology)是基于虚拟样机的数字化设计方法,在产品设计开发工程中,把零部件设计和分析技术融合一起,在电脑中建立产品的虚拟模型,针对产品在投入使用后的各种工况完成仿真分析,从而预测产品的各项性能,进而改进产品设计,大大提高产品的性能,降低研究开发成本,缩短研究开发周期。
MotionView & MotionSolve软件是美国Altair公司开发的新一代多体动力学软件,完全集成在HyperWorks平台中,可为用户提供强大的多体动力学前后处理、求解与优化功能。多体动力学分析过程有以下步骤构成:
(1)导入CAD模型
(2)简化、整理模型
(3)添加约束副、运动驱动、接触约束
(4)定义输出
(5)求解模型
(6)查看结果
汽车换挡定位机构由换挡杆、换挡旋转轴、套管、柱塞和止位块构成。其中换挡旋转轴和止位块固定在换挡器壳体上,换挡杆可绕换挡旋转轴旋转,套管和柱塞安装在换挡杆中部,套管可认为固定在换挡杆上,柱塞和套管之间使用弹簧来降低冲击,柱塞上部为子弹头结构,与止位块内表面直接接触,止位块内表面为复杂曲面,根据P、R、N、D、M、M+、M-各个挡位来确定曲面内不同的止位位置。当驾驶员换挡时,换挡杆绕旋转轴旋转一角度,带动套管和柱塞一起旋转,当柱塞头部子弹头落入止位块止位位置时,可认为换挡操作已完成。
3.1 前处理
多体动力学模型的建立是在已有CAD模型的基础上(CATIA软件的stp格式的输出文件)进行适当和必要的简化,使用MotionView进行约束副设置、接触设置、运动驱动设置,定义输出,从而得到换挡机构的动力学模型。换挡机构的正视图和左视图如图2所示。

图2 换挡机构的多体动力学模型
约束副设置如下:
换挡杆旋转轴和换挡止位块固定在换挡器壳体中,本模型中假定这两个部件固定在地面上,换挡杆与换挡旋转轴以转动副连接,柱塞套筒与换挡杆以固定副连接,柱塞与套筒之间以移动副相连。
接触设置如下:
子弹头柱塞和止位块内部复杂曲面相相连,Normal Force使用Volume Model,参数使用默认值。
弹簧设置如下:
子弹头柱塞和套筒以移动副相连,同时以弹簧来降低冲击,弹簧的参数设置为:弹簧刚度为线性值1.5N/mm,阻尼值为0.015,预载值为20N,自由长度为35mm。
驱动设置如下:
驱动定义在换挡杆与换挡旋转轴连接的转动副上,属性显示为位移使用函数来定义,函数方程为0.075*5*sin(PI/10*TIME)。
输出设置如下:
模型的输出包括换挡力和换挡杆旋转的角度。换挡力施加在换挡杆轴线上,与换挡旋转轴轴线距离为300mm,在换挡受力点建一个Marker点,以此处为参考点在换挡杆上定义一个载荷。换挡杆的旋转角度定义在换挡杆和换挡旋转轴连接的转动副上,定位为Y方向的位移。
3.2 递交求解
求解参数设置如下:
仿真类型:Transient,终止时间:10s,最小步长:0.001s。
执行仿真。
3.3 后处理
仿真可得到换挡杆PRND和DRNP的运动过程,前5秒为从P挡到D挡的运动过程,后5秒为从D挡到P挡的运动过程。分别输出换挡力随时间的变化曲线,换挡杆旋转角度随时间的变化曲线。以换挡杆旋转角度为横坐标,以换挡力为纵坐标,可以得到换挡力随换挡杆旋转角度的变化曲线。
4 仿真结果分析
换挡力随换挡杆旋转角度的变化曲线为图3所示。换挡力在PRND换挡过程中的最大值如表1所示。
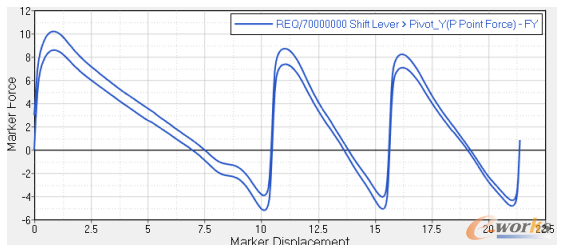
图3 换挡力随换挡杆旋转角度的变化曲线
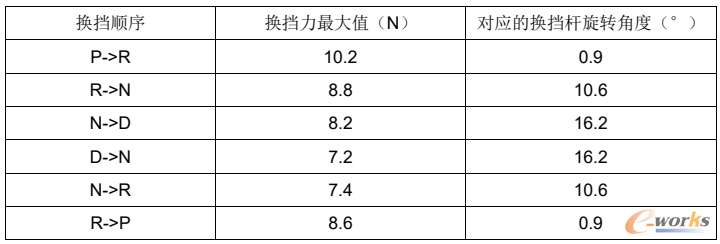
表1 换挡力在PRND换挡过程中的最大值
5 结论
通过MotionView可以进行自动换挡器换挡机构的动力学模拟,仿真得到的PRND换挡力的变化曲线可与实验曲线进行对比。利用MotionView的虚拟样机仿真优势,可大大加快换挡器的设计速度,节省研发成本,缩短研发周期。
6 参考文献
[1] Harald auheimer 等著,宋进桂、龚宗洋等译《汽车变速器理论基础.选择.设计与应用》机械工业出版社 2014
[2] 王望予主编 《汽车设计》机械工业出版社 2007
[3] Altair Engineering, MotionView User’s Guide, 2009, Troy, MI
[4] 李修峰、王亚斌、王晨编 《MotionView & MotionSolve 应用技巧与实例分析》 机械工业出版社 2013
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章