伺服驱动器内部原理可分为结构组成、工作流程及控制方式三部分进行讲解:
一、内部结构组成
主控单元
以数字信号处理器(DSP)为核心,负责执行矢量控制算法、PID调节及通信协议处理,实现位置/速度/力矩的闭环控制;
功率变换模块
包含三相全桥整流电路和智能功率模块(IPM),完成交流-直流-交流(AC-DC-AC)的电能转换,内置过压/过流/过热保护功能;
电源电路
将外部输入电源转换为不同电压等级的直流电,为继电器板、驱动板及控制芯片供电;
反馈接口
集成编码器信号处理单元,实时采集电机转子位置、转速等参数,用于闭环控制修正。
二、工作流程
整流阶段
三相交流电通过整流电路转化为直流电,为逆变环节提供稳定母线电压;
指令解析
接收上位机的脉冲/模拟指令,经DSP解析生成目标控制量(如目标位置或转速);
闭环调节
结合编码器反馈的实际参数,通过电流环-速度环-位置环的三环控制算法动态调整输出;
功率输出
采用PWM调制技术,通过IPM模块将控制信号转化为三相正弦波驱动电机运转。
三、核心控制方式
位置控制模式
通过脉冲指令精确控制电机转角,适用于数控机床等高精度定位场景;
速度控制模式
利用模拟量或总线指令调节转速,动态响应时间可达到毫秒级;
力矩控制模式
直接控制电机输出扭矩,应用于需要恒力输出的装配机器人等设备。
上述原理实现依赖于软启动电路降低启动冲击、M/T测速法提升编码器采样精度等技术细节。不同应用场景可通过参数配置灵活切换控制模式,实现机电系统的最优匹配。
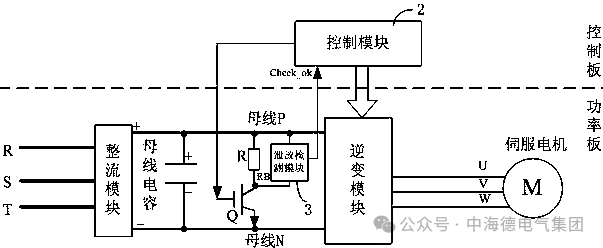
图1 伺服驱动器结构示意图
伺服驱动器内部原理的典型电路结构可通过以下模块及其相互关系进行解析,各模块的输入输出关系及功能说明如下:
01 主电路结构(功率变换路径)
三相交流输入滤波
L1/L2/L3:接入三相交流电源(380V/220V),通过Y型接法电容滤除高频谐波;
整流模块:采用三相全桥整流电路,将交流电转换为直流电(如输入220VAC时输出290-300VDC);
滤波电容:平滑整流后的直流电,形成稳定的母线电压(400-500VDC电解电容)。
直流母线保护与制动
限流电阻(R1):抑制开机瞬间的电容充电电流,充电完成后由继电器短接;
制动单元:包含制动电阻(R4)和IGBT开关,用于消耗再生能量(如电机发电导致母线电压超过阈值时触发)。
逆变输出模块
IGBT逆变桥:将直流电逆变为三相正弦交流电驱动电机,采用PWM调制技术(开关频率达150kHz);
续流二极管:与IGBT反并联,提供电流续流通路。
02 控制电路结构(信号处理路径)
电源分配与信号隔离
电源板:将外部直流电转换为多路低压电源(如±15V、5V),为控制芯片和接口电路供电;
光电隔离电路:隔离功率侧与控制侧信号,防止干扰(如驱动信号与反馈信号的电气隔离)。
核心控制单元
DSP/主控芯片:执行矢量控制算法,处理位置/速度/力矩指令,生成PWM波形;
电流环调节:通过电流反馈电路实时采样电机相电流,实现力矩控制闭环。
反馈信号处理
编码器接口:接收电机编码器的ABZ信号,解析转子位置和转速(如131072脉冲/转的高分辨率编码器);
分压电阻(R2/R3):检测母线电压,触发过压/欠压保护。
03 典型电路模块关联示意图:
说明:
电路图获取建议:伺服驱动器具体电路图通常由制造商提供,不同品牌设计细节存在差异(如制动电阻取值与母线电压相关)。
模块化设计特点:现代伺服驱动器多采用PIM集成功率模块,将整流、逆变、制动单元封装为一体化模块(适用于小功率场景)。
 文章
文章
