科技洪流奔涌,AI如何赋能?在电力、冶金等高危生产现场,既是安全挑战的“高压区”,也是效率跃升的“新蓝海”。
科远智慧四足机器人解决方案,以深度AI+仿生技术,突破工业现场应用壁垒,重塑安全与效率的新边界!
工业现场的“全能搭档”:科远智慧四足机器人解决方案
科远智慧四足机器人解决方案以“智能感知+智能协同+数字孪生”为核心,打造覆盖“环境探测-任务执行-数据分析” 的全栈解决方案,成为工业现场的“全能搭档”。
01全地形通过 运动无忧
地形穿越
轻松攀爬45°斜坡、跨越20cm台阶,高压室、钢梯、轨道如履平地。
极端抗性
IP67级防护,-20℃至55℃极端温域、粉尘弥漫、潮湿腐蚀环境稳定运行,使命必达。
动态避障
激光雷达+视觉融合,实时规避厂区行人、车辆等移动障碍,保障作业安全。
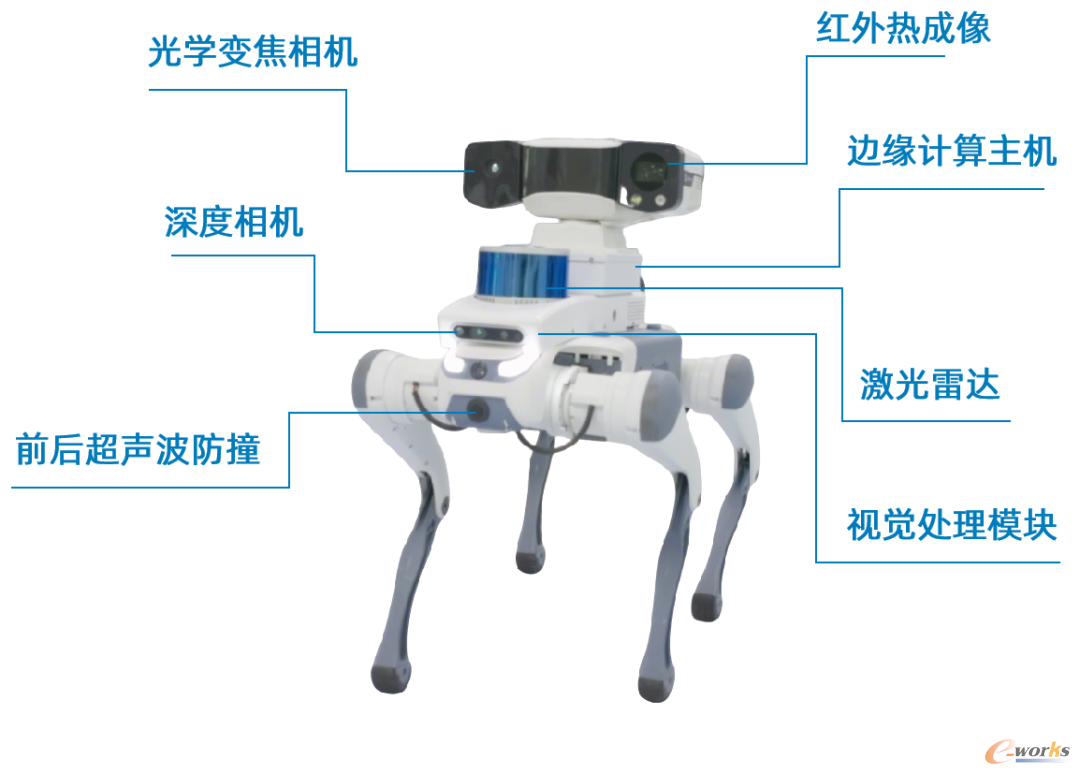
02 多模态感知 洞悉毫厘
三维构建
激光雷达每秒40万点云扫描,瞬间构建车间、设备的精细三维地图,精准导航。
动态目标
4D波雷达穿透烟尘迷雾,对动态目标(叉车、天车)0.1米级精准定位,响应速度<50ms。
精准定位
强光(钢水反射)、高温(炉壁辐射)等极端光照下,定位误差仍小于2cm,确保狭小空间、复杂路径不迷航。
03 模块化负载 按需定制
精准检测
搭载双光云台、声/气传感器等,自动完成“跑冒滴漏”、设备缺陷等异常检测。
安全送检
耐强酸密封式恒温样品箱,内置防晃支架,实现酸液、铁粉等危险样品“零接触”自动化送检,污染风险归零。
精细操作
机械臂、伸缩机构可完成开关操作、狭小空间探入等精细作业。
04 全流程数字大脑 智能协同
智能调度
基于任务优先级预测+动态优先级+负载均衡的调度策略,实现分区巡检协同,结合自修复路径规划确保故障时自动接管任务。
数字孪生
三维可视化呈现机器人状态、实时派发任务、远程配置参数,数据分析整合生成缺陷趋势报告,支持与工厂MES系统对接。
在电力与冶金等重工业领域,传统人工面临高危作业环境,而固定在线传感器存在检测盲区与部署维护成本高等局限,亟需构建“机器替人+移动替固定”的解决方案,实现安全替代、效率升级和成本优化。
电力矩阵 “安全巡检官”
在发电与变电站场景中,四足机器人化身 “移动式检测终端”,通过硬件配置实现全场景作业。
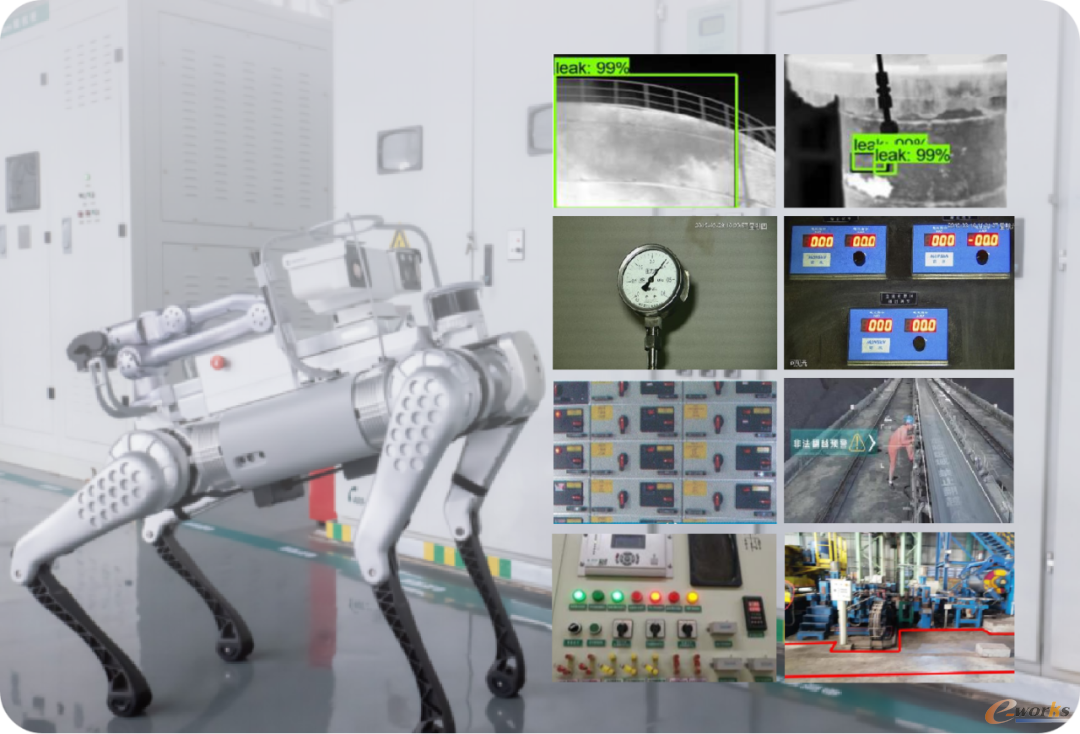
01 巡检与监控
红外、声纹、振动传感器,对高压设备进行全面检测,提前预警机械故障。高危区域无人化巡检,避免触电风险,高清摄像头自动对焦识别表计读数,检测跑冒滴漏,5G实时回传画面至远程专家诊断。
02 安全与应急
快速进入火灾、SF6气体泄漏等紧急环境,传输实时数据,评估风险。事故调查与搜救中,避免二次伤害,为安全保驾护航。
03 可扩展应用
通过激光雷达扫描构建三维数字孪生模型,助力运维规划。实现小型工具仓储与数据管理,自动生成巡检报告,结合AI分析预测设备寿命,实现智能化管理。
钢铁丛林 “智能铁卫”
面对高炉烈焰、腐蚀环境与粉尘弥漫的冶金场景,四足机器人以 “少人化、无人化” 方案破解安全与效率痛点。
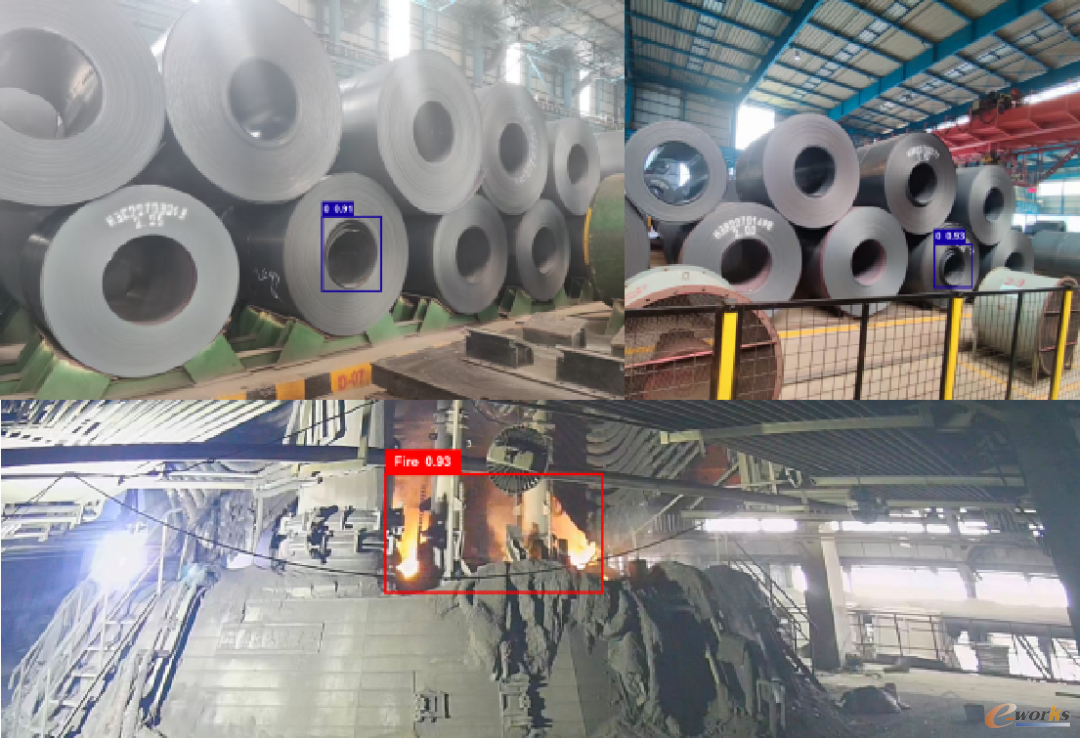
01 高温与高危环境巡检
实时采集炉盖视频,精准识别冒火风险。智能检测钢卷塌陷,标记缺陷钢卷位置,测量卷面温度记录冷却时间。设备缺陷识别效率较人工显著提升,确保生产安全。
02 样品送检与作业自动化
密封箱运输酸液、铁粉等样品,跨楼层自动化送检,人力成本降低70%,样品污染风险趋近于零,全流程“无接触”提效。
03 协同调度与数字孪生
多机器人集群作战,可布局分区巡逻,动态接管故障机器人任务,整体巡检效率大幅提升。数字孪生管控平台,三维可视化呈现高炉、车间状态,自动生成任务工单与缺陷趋势报告,助力 “设备状态可预测、维护策略可优化”。
从压电房到钢铁熔炉,科远四足机器人解决方案不仅是替代高危人工的“安全卫士”,更是打通数据链路、优化生产流程的“效率引擎”。科远智慧,致力以科技之力将 “少人化、无人化” 工业愿景,从蓝图照进现实,推动工业生产迈进更安全、更高效、更智能的新未来。
作者 | 科远智慧冶金技术中心 施海庆 司博文
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章
