0 引言
橡胶减振器因其阻尼性能好、结构简单、价格低廉等优点,在航天、船舶、汽车等工程领域得到广泛应用。但由于橡胶的复杂的非线性力学行为,缺乏准确的材料模型来描述其特性,使得橡胶减振器的选型和设计主要依靠工程经验和试验方法,耗费大量人力物力。随着有限元技术和计算机技术的发展,作为先进的非线性有限元软件一ABAQUS已经具备超弹性、粘弹性橡胶模型和体积不可压缩材料大变形的有限元计算功能,这为橡胶减振器的有限元分析提供了极大的便利。
1 橡胶减振器非线性有限元分析
1.1 橡胶减振器非线性特性
橡胶减振器非线性主要来源于几何非线性、材料非线性、边界非线性。其中几何非线性指橡胶为体积不可压缩材料,其在工况中会出现大弹性形变,已不能用小形变理论分析;材料非线性指橡胶材料为粘弹性材料,其应力-应变曲线为非线性的,且动态特性与频率、振幅、温度相关;边界非线性指橡胶材料与金属的接触过程中,其边界条件在分析过程中发生变化。在ABAQUS中,几何非线性即大变形可在分析步(Step)中选择开启,开启后在分析过程中会考虑到几何非线性;材料库中有丰富的材料可供选择,对于橡胶材料可选择超弹性、粘弹性;ABAQUS中在相互作用(Interaction)内定义各部分之间的相互作用,对于边界非线性可定义橡胶与金属支架之间的接触,通过接触算法实现边界条件非线性和力的传递。
1.2 橡胶材料参数的确定
在有限元方法中,常把橡胶近似视为不可压缩材料,使用超弹性本构模型描述其弹性能力,其中的Mooney-Rivlin本构模型如下

其中,I1、I2、I3是应变不变量,C10、C01、D1是由材料决定的常数。当D1=0时,橡胶完全不可压缩。Mooney-Rivlin模型可以仅使用C10、C01和D1三个常数,较精确地刻画在橡胶元件工作于中小应变时的弹性能力。
材料常数C10、C01和D1的确定,需要进行一系列的复杂试验。由超弹性材料常数C10/C01与橡胶的邵氏硬度HS有如图2的经验关系。而对于可自由变形的橡胶元件,其剪切模量G(MPa)与材料常数C10、C01有关系:

则对于选定硬度的橡胶材料,通过图确定C10/C01的值,在代入式(2)中,可以求解出材料常Cl0、C01。
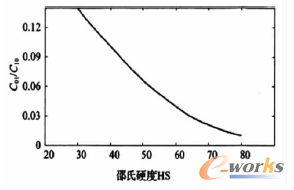
图1 材料常数与邵氏硬度的经验关系
本文所用橡胶减振器橡胶为某型号硅橡胶,其弹性剪切模量为2MPa,邵氏硬度为50。通过经验公式得到材料参数如表1。
表1 橡胶超弹性模型本构模型参数取值

除了要定义橡胶的超弹性材料参数外,还需要定义材料阻尼以及粘弹性参数。在ABAQUS中提供了多种阻尼模型:瑞利阻尼、结构阻尼、模态阻尼、全局阻尼。对橡胶选择材料阻尼(Damping)中的瑞利阻尼。
由手册可确定该硅橡胶的损耗因子为0.2,根据损耗因子P与临界阻尼比β之间的关系:

可得临界阻尼比为0.1。为了方便计算需将临界阻尼比转化为瑞利阻尼。瑞利阻尼可表示为

其中α为质量阻尼,β为刚度阻尼。对于单自由度系统,临界阻尼比与瑞利阻尼的关系为:

假设在低频段和高频段(5Hz?400Hz),系统具有相差不大的临界阻尼比,则可确定瑞利阻尼值α为0.988,β=0.00049。
1.3 建立橡胶减振器模型
为了研究其减振性能,将T型橡胶减振器与支架结构和质量块组合在一起,结构如图2。将减振器整体几何模型导入Hypermesh中划分网格,然后导入ABAQUS中进行参数设置和分析。
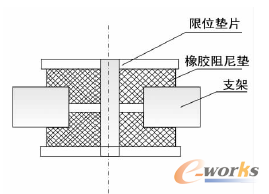
图2 T型橡胶阻尼垫结构剖面图
在有限元模型中,由于垫片与橡胶在实际运动中发生较小的位移,所以它们之间的相互作用定义为绑定约束(Tie)4。橡胶垫与支架在实际运动中既有相对的位移,也有力的传递,所以它们之间的相互作用定义为面面接触(SurfacetoSurface)。接触属性可定义接触面之间的法向行为和切向行为。法向行为是指接触面之间法向力的传递方式,这里选择’’硬接触’’即接触面之间传递的力的大小不受限制,当接触力变为零或者负值时,两个接触面分离,并且去掉相应节点上的接触约束。切向行为是指接触面之间切向的力学作用,常见的方式是定义库伦摩擦,通过摩擦系数来表示接触面之间的摩擦特性。如图3所示是单自由度橡胶减振器系统的有限元模型。
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章