伺服系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟跟随输入目标(或给定值)的任意变化的自动控制系统。
那么伺服电机是如何实现精准定位,如何理解它的闭环特性,今天我们就来说说。首先我们看下交流伺服系统的组成,由伺服驱动器和伺服电机组成。这里我们主要讲述伺服驱动的工作原理,电机只是一个执行机构。驱动器的结构简图如下,和变频器的主电路类似,电源经过整流,逆变,实现从AC→DC→AC的转换。
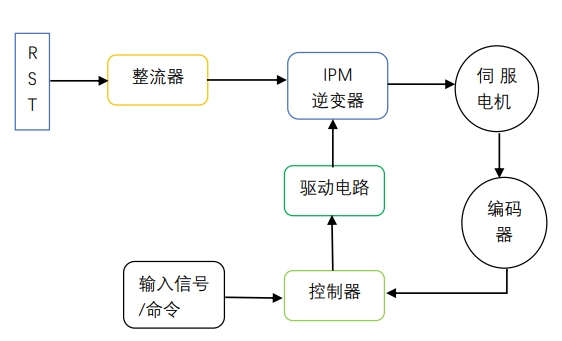 伺服驱动器结构简图
伺服驱动器结构简图
输入信号/命令可以是位置、速度、扭矩等控制信号,对应伺服电机的三种控制模式,每种控制模式都对应着环的控制,扭矩控制是电流闭环控制,速度模式是速度闭环控制,位置模式则是三闭环控制模式(扭矩、速度、位置)。
下面我们对位置模式的三闭环进行分析:
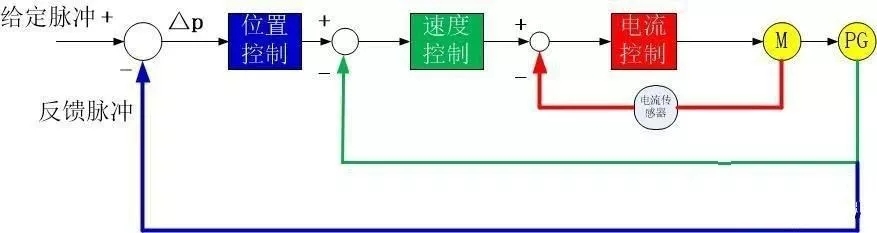 位置模式的三闭环控制
位置模式的三闭环控制
上图中M表示伺服电机,PG代表编码器,最外面的蓝色的代表位置环,因为我们最终控制的是位置(定位),内环分别是速度环和电流环(扭矩环),位置模式下速度环和电流环作为保护环防止失速控制和过载以确保电机恒速运转和电机电流恒定。我们重点看下位置环是如何确保电机能够准确旋转给定的角度。
假如我们给定脉冲为1个,此时反馈脉冲为0,脉冲偏差△p=1,输入到控制器中,这时候驱动电路控制IPM逆变器产生SPWM波驱动伺服电机旋转,注意这个SPWM波和我们plc发脉冲的方波是不一样的,时电机带动编码器旋转发出反馈脉冲,这个时候△p=0,电机停止输出,1个脉冲定位完成。整个从发出脉冲到接受反馈脉冲的过程就是一个闭环过程,从而确保电机能够准确定位,脉冲的数量决定定位的距离,脉冲的频率决定电机的转速。
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章