先来说说转速控制。西门子 PLC 控制伺服电机转速的核心是发送脉冲信号,脉冲频率直接决定电机转速,频率高则转速快,频率低则转速慢。在自动化生产线中,物料传输速度常需灵活调整。以西门子 S7 - 1200 PLC 为例,若要让电机以 2500r/min 的速度运转,我们可以这样编程:

图1 编程示例
但在实际操作时,电机转速不稳的情况时有发生,主要原因大多是周边大型设备产生的电磁干扰。解决这个问题,我们可以从硬件和软件两方面入手。硬件上,做好 PLC 和伺服电机的接地工作,把普通信号线替换成屏蔽线;软件上,在程序里添加滤波算法,以此来稳定转速。
再讲讲转向控制。西门子 PLC 通过改变脉冲的相位或电平,就能轻松控制伺服电机的转向。就拿机械手臂的工作场景来说,在抓取、搬运和放置物品的过程中,机械手臂的旋转方向需要频繁切换。在 S7 - 1200 中,实现转向控制的代码如下:
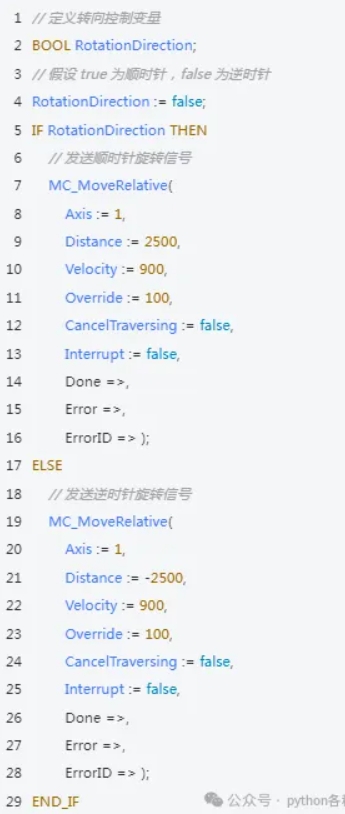
图2 编程示例
要是转向出现错误,大概率是 PLC 与驱动器之间的接线存在问题。这时候,仔细检查接线,就能解决转向异常的问题。
最后聊聊位置控制。在数控机床、机器人等对位置精度要求极高的应用场景中,PLC 与编码器配合组成闭环控制系统。还是以 S7 - 1200 为例,实现位置控制的代码如下:

图3 编程示例
当出现定位不准的情况时,很可能是编码器精度不足导致的。这种情况下,更换高精度的编码器,就能显著提升定位精度。
家人们,关于西门子 PLC 与伺服电机的关键知识点都在这里了。要是还有疑问,别犹豫,直接在评论区留言,咱们一起探讨!
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章