伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及加工中心等自动化设备。而MCU作为电机驱动系统设计的控制核心,是系统整体性能与设计的关键所在。本文将分享一些运用到低压伺服驱动器应用的已量产案例及其主控IC选型,以作参考。
移动机器人的应用案例
自动导引车(AGV):针对AGV采用蓄电池供电的特点以满足大范围快速移动,因此不适宜使用220v电源需要自身携带电源。直流电源无疑是解决之道,同时也为了安全的考虑需要要求伺服驱动器的电源是直流低压80v以下通用的电压以24v/48v为主,因此移动的AGV小车多采用低电压伺服驱动设计方案。
服务机器人:这类机器人通常用于酒店、餐厅等人流量较大的场所,执行送餐、指引等任务。低压伺服驱动器可以帮助实现平滑启动/停止动作,以及避障时的灵活转向,提升用户体验。
旋翼飞行器的应用案例
消费级无人机:对于消费市场上的无人机来说,轻量化是关键因素之一。采用低压伺服驱动器不仅可以减轻重量,还能增强飞行稳定性,因为它们提供了更细腻的桨叶角度调整能力,从而更好地应对风速变化。
工业级无人机:在工业监测、测绘等领域使用的专业无人机对载荷能力和续航时间有较高要求。使用高效的低压伺服驱动器可以在不牺牲性能的前提下延长飞行时间,并且由于其良好的热管理特性,即使长时间作业也能保持稳定工作状态。
实战方案:
方案一:极海G32R501低压无感双电机参考方案
方案支持双电机无感FOC控制,单核条件下仅需24.8μs即可对双电机执行完整电流环控制,内置静态(电阻、电感、磁链)参数辨识、在线电机电阻辨识功能,配置模型参考自适应,PI自整定,可实现对大多数永磁同步电机的自动控制。
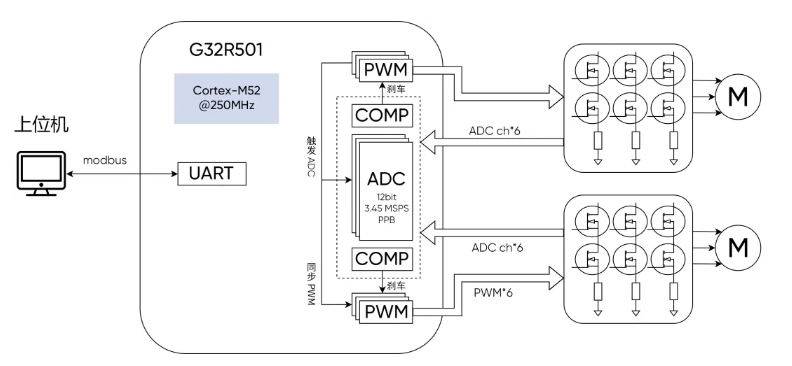
图1 参考方案
方案规格:
输入电源范围:DC 12V~48V
输出峰值电流:20A
最低控制频率:1Hz
启动:满力矩闭环启动(4Hz及以上目标频率)
控制方式:V/F、单电流闭环控制、双闭环控制
PI参数:模型参考自适应
其他功能:参数掉电保存、软件复位
电机参数辨识:静态辨识电阻、电感、磁链,在线电阻辨识
通讯方式:Modbus协议
配套资料:配套自研上位机、用户手册等
方案二:先楫HPM6300低压伺服驱动器应用方案
基于HPM6300的低压伺服驱动器应用方案,具有高性能、高可靠性、高性价比等优点,在不同温度、湿度、振动等工业环境中可实现稳定运行,主控MCU丰富外设接口支持伺服电机系统一体化设计。
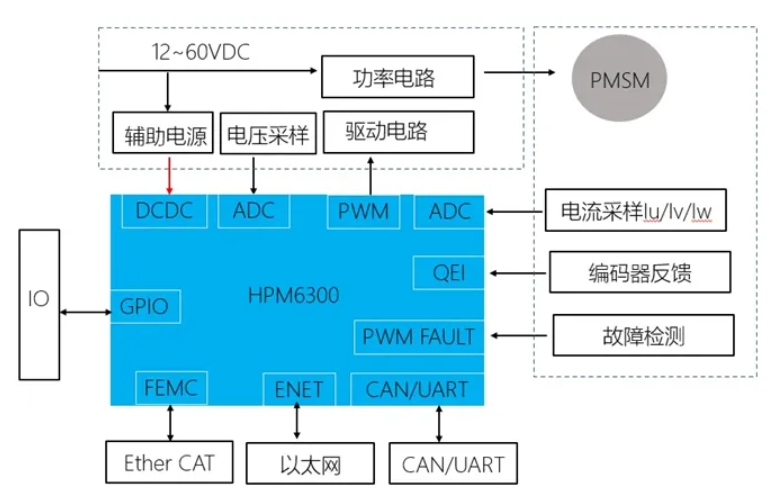
图2 典型系统框图
方案特点
采用先楫高性能、高实时性的微控制器HPM6300系列,主频高达 648MHz,Coremark 高达 3390,提高了伺服的响应特性。
利用HPM6300的 3个独立 16位ADC,可同时采集电机电流和母线电压进行快速采样,提高伺服的控制精度。
支持大容量本地存储,128KB ILM (0等待指令SRAM) 和128KB DLM (0等待数据SRAM),提高代码或数据的访问速度,有助于实现快速电流环。
内置16位 FMEC接口,满足与外围FPGA或 EtherCAT从站芯片进行高效通信。
完整开源的的位置、速度、电流三环FOC源码,其中,电流环延时仅1.06us,有效缩短客户的产品开发时间,为 ”单芯片” 伺服提供可能性。
内置 CAN接口,支持 CANFD通讯。
内置 FFT/FIR协处理器,实现快速的FFT计算,对于电流、电压信号进行实时分析,助力电机预维护功能。
方案三:极海APM32F407低压伺服驱动器应用方案
极海APM32F407低压伺服驱动器应用方案,具有高效运算处理能力、高可靠性、高功率密度,在不同温度、湿度、振动等工业环境中可实现稳定运行,主控MCU丰富外设接口支持伺服电机系统一体化设计。
方案特点
速度控制模式:通过按键设定目标速度,电机转速稳定在目标速度;
位置模式模式:通过按键设定目标位置,电机能精准停留在设定位置;
编码器接口:可连接增量编码器,实现高精度控制;
EtherCAT模块:可实现EtherCAT通信,配合PLC、PC、EC实现复杂的运动控制;
人机交互:读取FLASH的UI素材并显示到LCD屏,LCD能显示目标速度/位置、实际速度/位置、运行模式、运行状态,更直观地体现系统的运行情况。
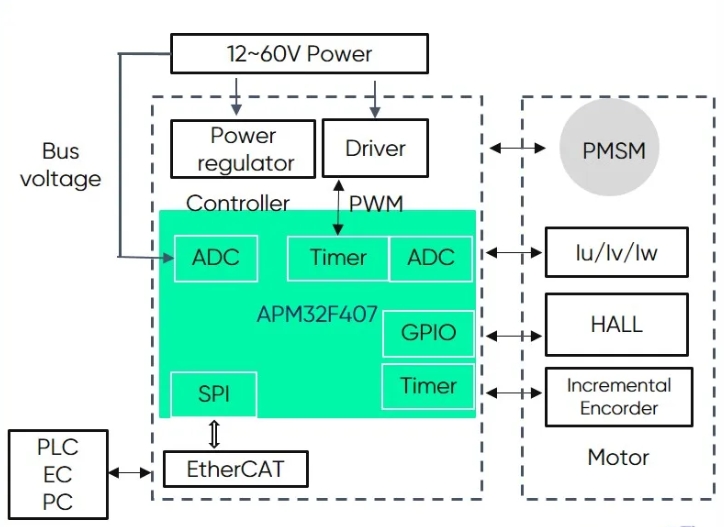
图3 APM32F407 低压伺服驱动器方案实现框图
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章