传统减摇鳍控制系统依赖模拟电路或专用控制器,存在系统复杂、维护困难、扩展性差等固有缺点。随着技术发展,可编程逻辑控制器(PLC)凭借其高可靠性、编程灵活性及易于扩展的优势,已成为该领域广泛应用的新型解决方案。
船舶在航行中因风浪等外力作用产生横摇、纵摇,危及稳定与舒适。减摇鳍作为常见装置,通过主动控制鳍片产生反向力矩以抑制横摇。
传统减摇鳍控制系统依赖模拟电路或专用控制器,存在系统复杂、维护困难、扩展性差等固有缺点。随着技术发展,可编程逻辑控制器(PLC)凭借其高可靠性、编程灵活性及易于扩展的优势,已成为该领域广泛应用的新型解决方案。
01 基于PLC的减摇鳍控制系统组成
传感器:用于采集船舶横摇角、横摇角速度、航速等信号,包括陀螺仪、加速度计、速度传感器等。
PLC控制器:系统的核心控制单元,负责接收传感器信号并根据预设的控制算法计算出减摇鳍的动作指令。
执行机构:根据PLC输出的控制信号驱动减摇鳍运动,包括液压系统、电机等。
人机界面(HMI):用于显示系统状态、设置参数、进行故障诊断等。
02 基于PLC的减摇鳍控制系统工作流程
数据采集:传感器实时采集船体横摇角、横摇角速度等运动参数,并传输至PLC控制器。
数据处理:PLC对传感器数据进行处理,计算当前横摇状态,并与设定目标比较,生成误差信号。
控制计算:PLC根据预设控制算法(如PID),计算出减摇鳍所需的动作指令(如偏转角度和速度)。
执行控制:执行机构接收PLC指令,驱动减摇鳍片进行相应偏转,产生抵消横摇的反向稳定力矩。
控制系统方案介绍(中国船舶某船)
A 核心配置
该系统采用傲拓NJ400系列PLC。
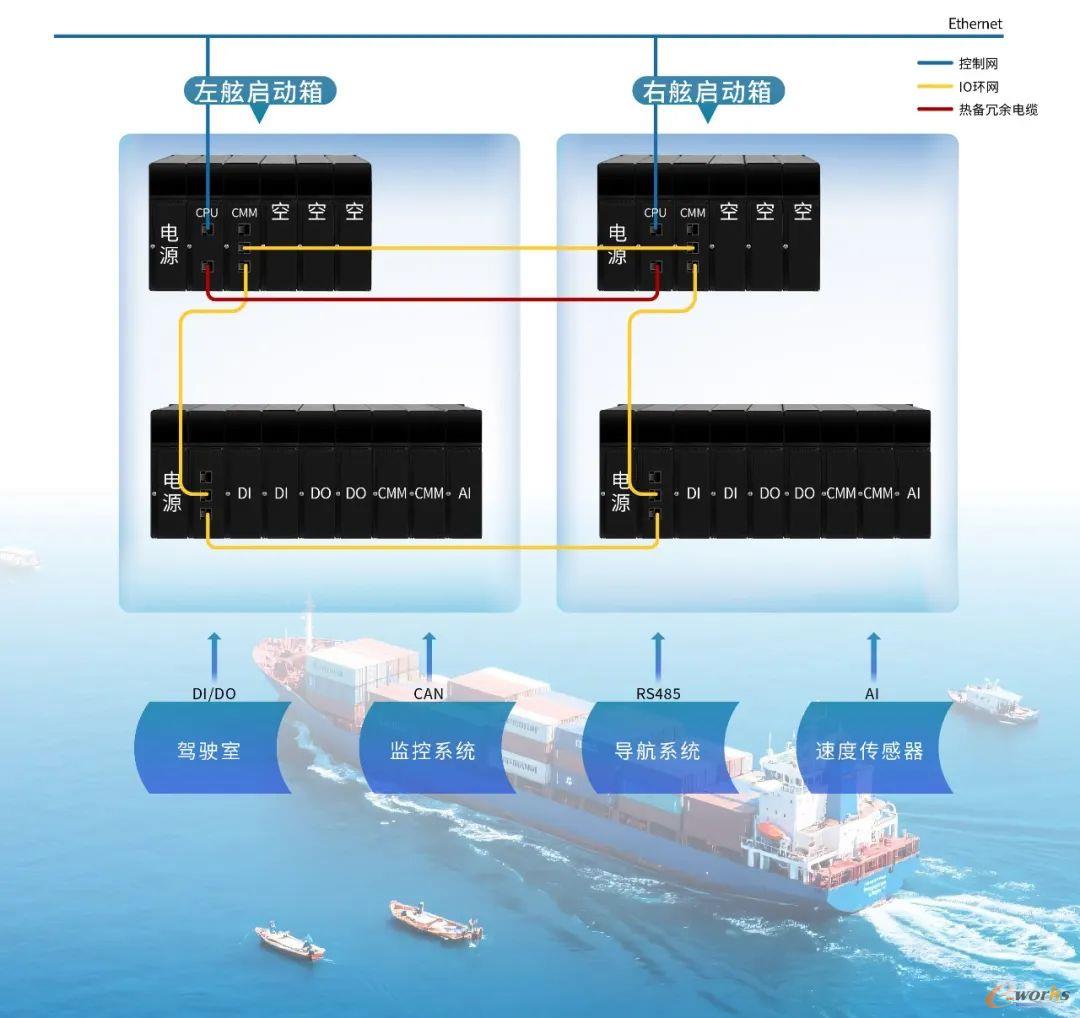
B 系统架构
采用双机架冗余架构,主备两个PLC机架分别放置于两个控制柜中。
两个以太网远程I/O机架分别控制左、右舷减摇鳍,并与主备CPU机架共同组成以太网环网。
C 基本工作原理
系统通过模拟量输入模块采集横摇角传感器(陀螺仪/倾角仪)的信号(横摇角度、角速度),经PLC内部控制算法运算后,输出指令驱动液压油缸动作,推动减摇鳍转动以产生稳定力矩,并将所有状态信息上报至中央监控系统。
D 方案主要特点
CPU性能:CPU401-0511采用国产处理器。
CPU冗余:双机架冗余。
网络冗余:集成双网口,10/100M自适应。
总线冗余:以太网主站和从站形成环网;支持By-pass功能。
该系统的成功应用显著提升船舶在恶劣海况下的稳定性与舒适度,减摇性能达领先水平。随着人工智能与自适应算法的深度融合,傲拓PLC将持续进化——更智慧的预测控制、更低的能耗表现、更广泛的船舶适配能力,为智能船舶和海洋装备控制系统提供坚实技术底座!
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章
