我们利用SOLIDWORKS建模、三维仿真、应力分析,设计出浮动夹紧双向定心夹紧机构,解决了以毛坯表面作定位基准时的浮动夹紧问题。该机构在大批量生产中有着十分重要的现实意义,同时也展现出Solidworks强大的三维设计优势。本文简要介绍该机构的工作原理以及设计。
在工业飞速发展的今天,利用三维设计解决异形零件夹具问题,已成为业内人士必不可少的手法之一。传统的平面CAD设计以及大量的理论计算,对于异形零部件夹具设计相当的困难,已远远跟不上设计要求;例如在进行批量生产的自动机床或组合机床生产线上,经常遇到一些以毛坯表面作定位基准的不规则的回转体类零件。由于这类零件其本身存在着铸造误差,所以很难保证其对中和均匀夹紧的要求,这是工程技术人员都在努力探讨的问题。我们利用SOLIDWORKS建模、三维仿真、应力分析,设计出浮动夹紧双向定心夹紧机构,解决了以毛坯表面作定位基准时的浮动夹紧问题。该机构在大批量生产中有着十分重要的现实意义,同时也展现出Solidworks强大的三维设计优势。下面简要介绍该机构的工作原理以及设计。
1、工作原理
浮动夹紧双向定心夹紧机构的基本工作原理是:当被夹持工件的尺寸有误差时,它的两对卡爪可以在设计的范围内自动进行调节,通过钢球与锥面的补偿作用,使夹持的工件对中,并使夹紧力均匀作用在四个卡爪上。其工作过程分析如下。
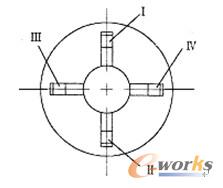
图1 卡爪位置示意图
为便于说明,将图1所示的Ⅰ、Ⅱ、Ⅲ、Ⅳ四个卡爪按相互垂直方向分成两对。以外夹为例,根据传动原理图(见图2),这时与Ⅰ、Ⅱ这一对卡爪相连的杠杆3分别插入外锥套4的孔中,与Ⅲ、Ⅳ这一对卡爪相连的杠杆9分别插入内锥套6的孔中。需要说明的是,图2所示的仅仅是两对卡爪中各自只有一个卡爪的杠杆分别插入内、外锥套时的工作情况。
当油缸拉杆7向左移动时,拉动拉杆套8,并压迫钢球5,通过锥面推动外锥套4和内锥套6同时向左运动。外锥套4推动杠杆3,内锥套6推动杠杆9,各自带动与之相连的卡爪1、滑块2和卡爪11、滑块10动作,如图2所示。在夹紧过程中,假定工件存在着定位尺寸误差,标号为Ⅰ、Ⅱ的这一对卡爪先接触工件,标号为Ⅲ、Ⅳ的另一对卡爪距离工件还相差一个间隙Δl1(设两卡爪距工件间隙值相等,即ΔlⅢ=ΔlⅣ),此时外锥套4尽管受到钢球5的作用力,但由于与其相连的Ⅰ、Ⅱ卡爪已夹住工件,行程受到限制s,所以外锥套4不能向左移动。而内锥套6由于与其相连的Ⅲ、Ⅳ两卡爪各自与工件的间隙值相等,因此内锥套6在钢球5的作用下,可以产生与外锥套4的相对滑移,即向左移动,直到Ⅲ、Ⅳ这一对卡爪均移动同样距离夹紧工件后停止,其移动距离的大小即误差补偿值大小,是由设计的结构参数决定的。
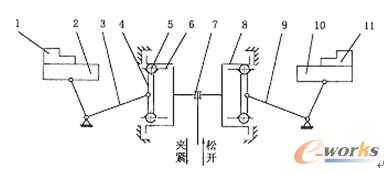
图2 传动原理图
1.卡爪Ⅰ 2、10.滑块 3、9.杠杆 4.外锥套 5.钢球
6.内锥套 7.拉杆 8.拉杆套 11.卡爪Ⅲ
以上讨论的是Ⅲ、Ⅳ这一对卡爪距离工件的间隙相等时的情况。当工件处于偏夹状态,即Ⅲ、Ⅳ卡爪离工件的间隙ΔlⅢ≠ΔlⅣ(假定ΔlⅢ<ΔlⅣ)时,这样在夹紧时,由于内外锥套的相动滑移而使卡爪Ⅲ与卡爪Ⅰ、Ⅱ同时接触工件。在卡爪Ⅰ、Ⅱ、Ⅲ的同时作用下,工件具有向不产生约束力作用的卡爪Ⅳ的方向移动的趋势。此时,在卡爪Ⅲ的作用力下,工件会自动地向不受约束的方向移动,使得ΔlⅢ=ΔlⅣ,然后四个卡爪均匀施力夹紧工件后停止。
前述是Ⅰ、Ⅱ卡爪先接触工件后Ⅲ、Ⅳ卡爪的动作,当Ⅲ、Ⅳ卡爪先接触工件时,Ⅰ、Ⅱ卡爪的动作过程分析方法与上述完全一致。
夹紧动作完成后,工件自动对中,夹紧力均匀作用在四个卡爪上。工件的夹紧对中精度和重复定位精度均由卡盘制造精度来保证。对于大直径的工件卡盘,在制造工艺中采用在整体装配后用超硬硬质合金刀具修卡爪齿面的方法,来补偿装配尺寸中的误差。通过修磨调整垫,可以调整机构的间隙,以提高重复定位精度。
2、结构特点
夹紧机构的主要结构特点如下:
(1)工件误差调节范围大,设计指标单爪误差调节值为±3.5mm,即单向实际可达7mm,可以适应大批量生产中毛坯的变化要求。
(2)夹紧力大,输入油缸作用力为100kN,实际四爪夹持力最大为250kN。
(3)定位精度高,重复定位精度为0.02mm。
(4)结构可靠,易于制造。
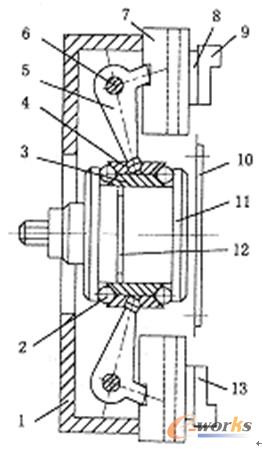
图3 夹紧机构简图
1.夹具体 2.钢球 3.内锥套 4.外锥套 5.杠杆 6.销轴 7.滑块
8.T型压板 9.卡爪Ⅰ 10.盖板 11.拉套 12.调整垫 13.卡爪Ⅲ
在solidworks中进行简单的建模,分析实际情形,从内到外依次根据关系建立参数模型,该机构部件较少且特征较为简单,详细步骤这里就不一一列出;
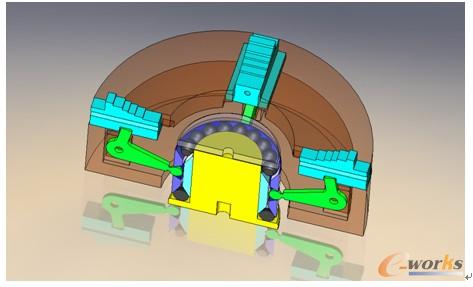
图4 位置一

图5 位置二
图示位置为该机构的最大夹紧状态与最小夹紧状态,两个极限位置杠杆分别处于一前一后工作,夹角在30度范围内,调节范围大,在装夹的过程中还可以通过滑板上面的螺栓调节卡爪,从而达到更大的调节范围和要求。
图6 小夹紧状态
在实际的使用过程中,在满足定位精度的情况下更因该考虑结构的刚性和稳定性,前后拉套两个位置钢球采用圆周完全均布,这样即使拉套后面的油缸和工件有过载,也能够得到良好的稳定性以及刚性而让机构不会被拉变形破坏;
我们在Simulation中对主要易损部件进行静态应力分析。以杠杆为例,分析步骤:分析类型(静态应力)---定义材质---定义约束夹具---定义外部载荷--运行生成网格分析,如图示应力及应变图解。
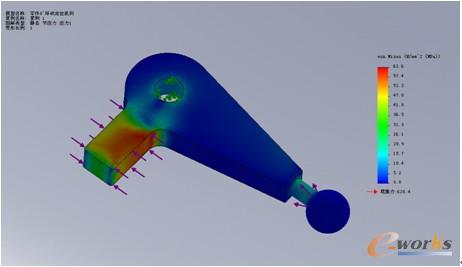
图7 应力图解
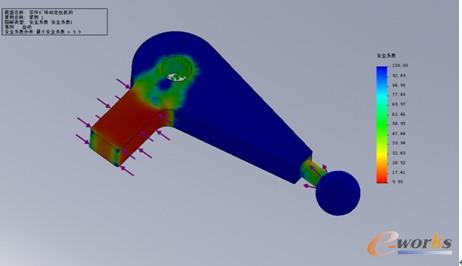
图8 安全系数
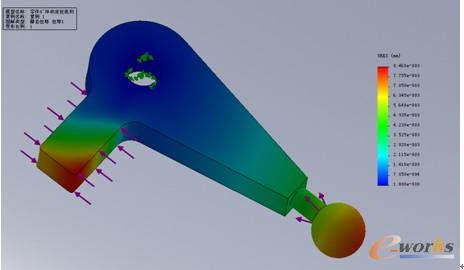
图9 变形位移
为更好的看清楚工件对机构的反作用力,我们拟作一反作用力受力分析,假定按100KN力计算结果如图示:
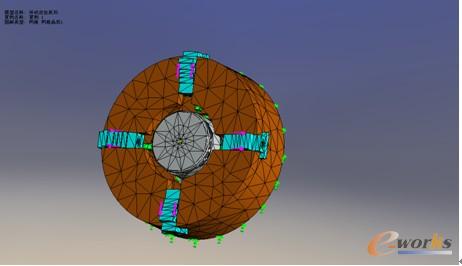
图10 网格划分
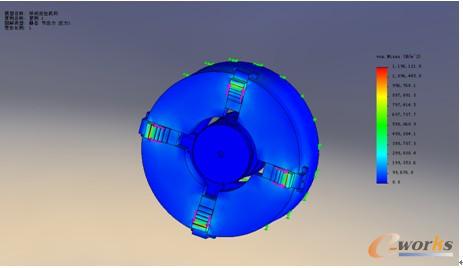
图11 应力分析
经分析验证,在静态应变分析下,各项参数均满足设计要求。
由此可见,三维设计与传统CAD二维设计相比较,不管是在效率上还是准确性上,三维设计具备相当的优越性,Solidworks以其清晰的思路,强大的三维实体建模装配、强度刚度校核、干涉碰撞检查和运动仿真功能,更能让广大工程师、设计师得心应手的设计出更好的产品。
本文为e-works原创投稿文章,未经e-works书面许可,任何人不得复制、转载、摘编等任何方式进行使用。如已是e-works授权合作伙伴,应在授权范围内使用。e-works内容合作伙伴申请热线:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章