如今,在产业政策支持、技术进步和市场驱动的共同作用之下,人形机器人俨然已成为当下最热门的机器人细分领域之一。那么,目前人形机器人的发展状况如何?人形机器人包括哪些关键技术?当前及未来的应用前景如何?本文将一一阐述。
用机器人辅助或替代人完成各项工作和任务,是人类一直以来的追求。因此,在机器人的发展过程中,为了适应多样化的场景和任务要求,诞生了工业机器人、协作机器人、移动机器人(如AGV、AMR)、四足机器人、履带式机器人、水下机器人、空中无人机、人形机器人等多种类型的机器人。
从技术演进来看,从单自由度到多自由度,从简单运动到复杂动作,从固定到可移动,从简单的自动化执行到具备智能感知与自我学习能力,从只能在封闭、隔离的空间内作业到能够实现与人类的协作与共融,是机器人的重要发展趋势。这其中,人形机器人作为在体能、技能和智能方面高度模仿人类的机器人,由于具有广泛的通用性和强大的环境适应性,一直是机器人的重点研究方向之一。特别是,近年来伴随着人工智能与大模型等技术的突破式发展以及人形机器人研发企业的不断涌现,如今人形机器人的研发进程已明显加快,并开始从实验室走向商业化应用。
在2024年8月举行的世界机器人大会上,众多人形机器人企业及科研机构均展示了其人形机器人产品,人形机器人整机参展数量创下历届之最,达到27款。从现场演示来看,这些人形机器人个个都“身怀绝技”,绘画、写毛笔字、念诗、跳舞、搬运物品、摆放货物等等,都是信手拈来。而且,自2023年以来,已有多家人形机器人企业将自家的人形机器人送入工厂“打工”。

图1 在2024世界机器人大会亮相的部分人形机器人整机产品
如今,在产业政策支持、技术进步和市场驱动的共同作用之下,人形机器人俨然已成为当下最热门的机器人细分领域之一。那么,目前人形机器人的发展状况如何?人形机器人包括哪些关键技术?当前及未来的应用前景如何?本文将一一阐述。
01 从想象到现实
起初,人形机器人主要停留于艺术家与科学家的想象与实践中,是技术与创意交织的梦想产物。例如,早在3000多年前,我国古籍《列子·汤问》就记载有“偃师造人”的故事——工匠偃师制造了能够模拟人类动作行为、能歌善舞的偶人。身处中世纪伊斯兰黄金时代的阿拉伯博学者阿尔·加扎利(Al Jazari)发明了宫廷宴饮的陪酒机器人。1495年,意大利画家、科学家达芬奇在其手稿中设计了一个穿着中世纪骑士盔甲的“机器武士”,它通过风能和水力驱动,能够做出与人类似的站立、摆动双手、摇头、张开嘴巴等动作。1927年,美国西屋公司的工程师温兹利(Ron Wensley)制造了第一个电动机器人“ Televox”,它装有无线电发报机,可以回答一些问题,但不能行走。这一发明成功后,温兹利进一步进行改造和包装,变成了人形机器人Herbert Televox。1928年,英国工程师威廉·理查德斯(W. H.Richards)发明出人形机器人埃里克·罗伯特(Eric Robot),其内置了马达装置,能够进行远程控制及声频控制。这些早期的思考和探索,代表了人形机器人的萌芽。
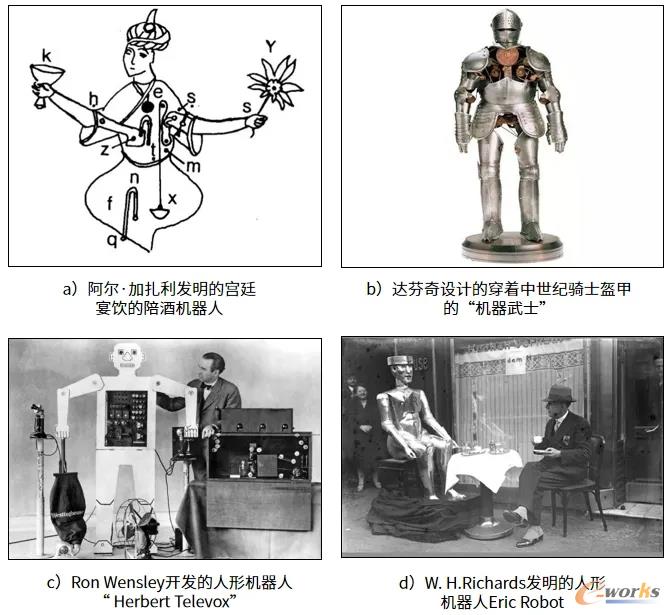
图2 人形机器人的早期思考与探索
随着第三次工业革命的到来,机械、电子、计算机科学以及材料工程等领域取得迅猛发展,推动了真正具有高仿真度的人形机器人的研究和发展。特别是近几十年来,材料科学、传感器技术、人工智能与机器学习等领域的突破性进展,为人形机器人赋予了前所未有的机动性、自主性与智能性。总的来看,自20世纪60年代以来,人形机器人的发展主要经历了三个关键阶段:
1.智能化早期探索阶段(1960年到1999年)
这一阶段的人形机器人实现了简单的行走,并在手部功能上实现了外观仿形和简单运动,但智能化水平较低。例如,日本早稻田大学于1972年研制成功的WABOT-1机器人,其身形巨大且显得相当笨重,配备了肢体控制系统、视觉系统和语音交互系统,拥有仿人双手和双腿,全身共26个关节,胸部装有两个摄像头,手部装有触觉传感器。WABOT-1机器人可以进行简单的日语对话,并且凭借耳朵、眼睛测量距离和方向,再依靠双脚行走前进,两手也具有触觉,可以搬运物体行动,但行动能力仅相当于一岁多的婴儿。日本本田公司从1986年到1997年的12年间相继研发了E系列双足机器人和P系列仿真机器人,其中E0到E6的走路速度由慢变快,到E6推出后已能够在斜坡上行走并跨过障碍物;P系列仿真机器人旨在实现上肢与腿部的配合,从P1到P3,机器人的手腿配合与自我调节能力不断提升,不仅可以手腿配合完成开门和拾取东西等动作,也能实现手推着车行走。然而,无论是本田的E系列还是P系列,智能化程度都较低。
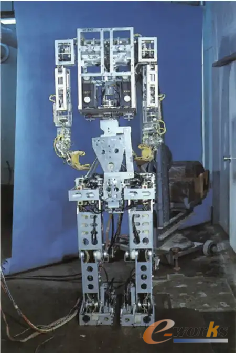
图3 日本早稻田大学研制的 WABOT-1机器人
2.智能化起步阶段(2000年到2016年)
进入21世纪,随着感知系统与交互系统等技术的进步,这一阶段的人形机器人具备初级感知功能,可以实现与外界环境有限的互动,并且运动自由度有所提升,不仅能行走,也能实现行走以外的其它简单操作。例如,本田公司于2000年发布了仿真机器人P4,也即为人熟知的ASIMO(Advanced Step Innovative Mobility,高级步行创新移动机器人),并且通过持续升级和迭代,到2011年推出第三代机型时,ASIMO已具备利用传感器避开障碍物等自动判断并行动的能力,并能用五根手指做手语,或将水壶里的水倒入纸杯。日本软银集团于2015年发布的Pepper机器人可以与使用者交流,能够读懂人类情感并做作出相应的反应,支持声音指令。

图4 本田ASIMO人形机器人(图源:本田官网)
3.智能化进阶阶段(2016年至今)
人工智能、机器学习和计算机视觉系统等先进技术的进步和突破,提升了人形机器人的感知和认知能力,使其不仅能够更灵活、敏捷地适应外界环境,也具备通识理解能力。所谓通识理解能力,是指机器人理解和处理广泛领域知识和信息的能力,这包括语义理解、情境感知、物体识别、常识推理、多模态理解(结合文本、图像、声音等多模态信息进行理解)等能力。而且,当前人形机器人在环境理解和智能交互等领域已取得显著进展,通用化、智能化进程正在加速。
例如,国外方面,波士顿动力于2016年公布了第二代Atlas机器人,它在外观上更加接近人类,头部安装了光学雷达和立体传感器,能够完成包括跑步、跳跃、开门、导航、躲避物体等多种复杂动作,还能进行货物搬运,甚至在货物掉落时也能继续完成任务,展现出了较强的感知与决策系统,以及优异的运动灵活性。作为Figure AI公司基于OpenAI大模型打造的全新人形机器人,Figure 02不仅具备视觉识别与推理能力,也具备语音交互功能,可以更自然地与人类进行交流。而且,Figure 02已进入到宝马工厂进行测试,能够执行精密的作业任务,如将钣金部件准确地插入特定装置中。

图5 Figure 02人形机器人在宝马工厂“打工”
在国内,优必选科技自2018年发布初代Walker X人形机器人后,经过多次迭代,其在智能化方面实现了多项技术的升级,包括基于U-SLAM视觉导航技术实现自主路径规划;基于手眼协调等AI和机器人集成技术,实现精准灵活的物体识别分拣与操作;基于内置的机器人情绪体系进行主动式交互,与用户建立共情等。傅利叶推出的基于多模态大模型的GR-1通用人形机器人,具有高度仿生的躯干构型和拟人的运动控制。
从全球范围来看,当前全球人形机器人研发竞争也愈发激烈,欧美和日韩等许多国家和地区已将发展人形机器人产业提升至战略高度,并催生了波士顿动力、特斯拉、Figure AI、Agility Robotics、Apptronik、1X Technologies、Sanctuary AI、Engineered Arts、Kawasaki Heavy Industries等知名人形机器人企业。我国人形机器人研究与产业尚处于培育期,但已呈现出加速发展趋势,并已涌现出了一批具有国际竞争力的人形机器人企业和创新中心,包括优必选科技、埃斯顿酷卓、宇树科技、云深处科技、追觅科技、傅利叶、智元机器人、逐际动力、达闼科技、帕西尼感知科技、钢铁侠科技、小米科技、纯米科技、威迈尔、银河通用、星动纪元、星尘智能、均普智能、开普勒、松延动力、天链机器人、乐聚机器人、钛虎机器人、戴盟机器人、伟景智能、星海图、蓝芯科技、Unix AI、EX Robots、方舟无限、月泉仿生、加速进化、众擎机器人、五八智能科技、巨蟹智能、小鹏汽车、卓益得、里工、萨恩异创、中电科机器人、中国兵器装备集团自动化研究所、国家地方共建人形机器人创新中心、北京具身智能机器人创新中心、浙江人形机器人创新中心、成都人形机器人创新中心等,呈现出“百花齐放”的局面,且部分技术成果已接近国际领先水平。
02 智能与仿生的突破
人形机器人也称为仿人机器人,是指具有人类形态和功能的智能机械体。它们通常拥有拟人大脑(实现感知决策与具身智能)和小脑(具备运动控制与规划能力)、拟人感官(能够利用先进的传感器实现感知融合,捕捉视觉、触觉和听觉等信息)、拟人四肢(拥有类人的智能化上肢和下肢,具备肢体执行能力),具备感知环境、操作物体、人机协作的能力,能够作为人类的得力助手,辅助或者替代人类执行危险、恶劣、重复环境下的多种类型任务,应对和处理未曾预料的情形。
从概念内涵上看,人形机器人涵盖了模仿人的形态、运动和功能的高级通用形态机器人,及其由此衍生、演变的机器人。从仿人的角度来看,人形机器人主要模仿的是人的形态、运动能力和功能,实现体能、技能和智能三者的融合协调。也就是说,人形机器人不仅要“长得像人”、行动类人,还要在理解、表达、思考等方面向人类看齐。
具体而言,人形机器人在形态上主要模仿人类的外观、皮肤、状态、表情等;在运动能力上主要模仿人类的奔跑、跳跃、腾挪、穿针引线等各项技能;在功能上主要模仿的是人类的情感陪护或交互对话等,能够通过面部表情、语音语调和身体语言来模拟人类的情感反应,同时基于语音识别和自然语言处理技术理解和回应人类的语言和指令,与人类进行自然语言交流。
与通常只能在封闭空间内、按照预先设定的编程程序执行特定作业任务的传统工业机器人相比,人形机器人的优势在于不再需要根据预先规划来完成特定任务,而是通过感知周边环境进行理解、学习并做出决策,拥有高度的通用性、灵活性、机动性和环境适应性,能够执行多样化的复杂任务;特别是在人工智能、机器学习与大模型等技术的加持之下,人形机器人拥有非常强的自主决策、柔性操作和交互能力。不过,这也造成了人形机器人在结构设计、硬件构成、控制算法、核心性能要求以及零部件选择方面,与传统工业机器人存在较大差异。因此,与传统工业机器人相比,人形机器人研发所涉及的关键技术更加复杂,面临的挑战也更大。
03 由“协作”切入“人形”
如今人形机器人的爆火,很容易让人联想到近年来协作机器人的火热。相较于人形机器人的应用还处于起步阶段,当前仿人双臂协作机器人以及结合了AGV/AMR移动底盘与协作机器人的移动协作机器人(也称“复合移动机器人”)的应用则相对成熟,且落地的场景也更多。例如,在汽车制造领域,双臂协作机器人可帮助汽车制造商进行车身和发动机组装;在航空航天领域,双臂协作机器人被用来组装和测试各种航天器的零件;在医疗领域,双臂协作机器人可以于帮助执行外科手术、康复训练、试剂检测等;在电力行业,双臂机器人可用于户外电力抢修与带电作业;在服务领域,双臂机器人可完成端茶、煎饼、制作咖啡、调酒、垃圾分类等任务。
表1 部分双臂机器人产品及其应用
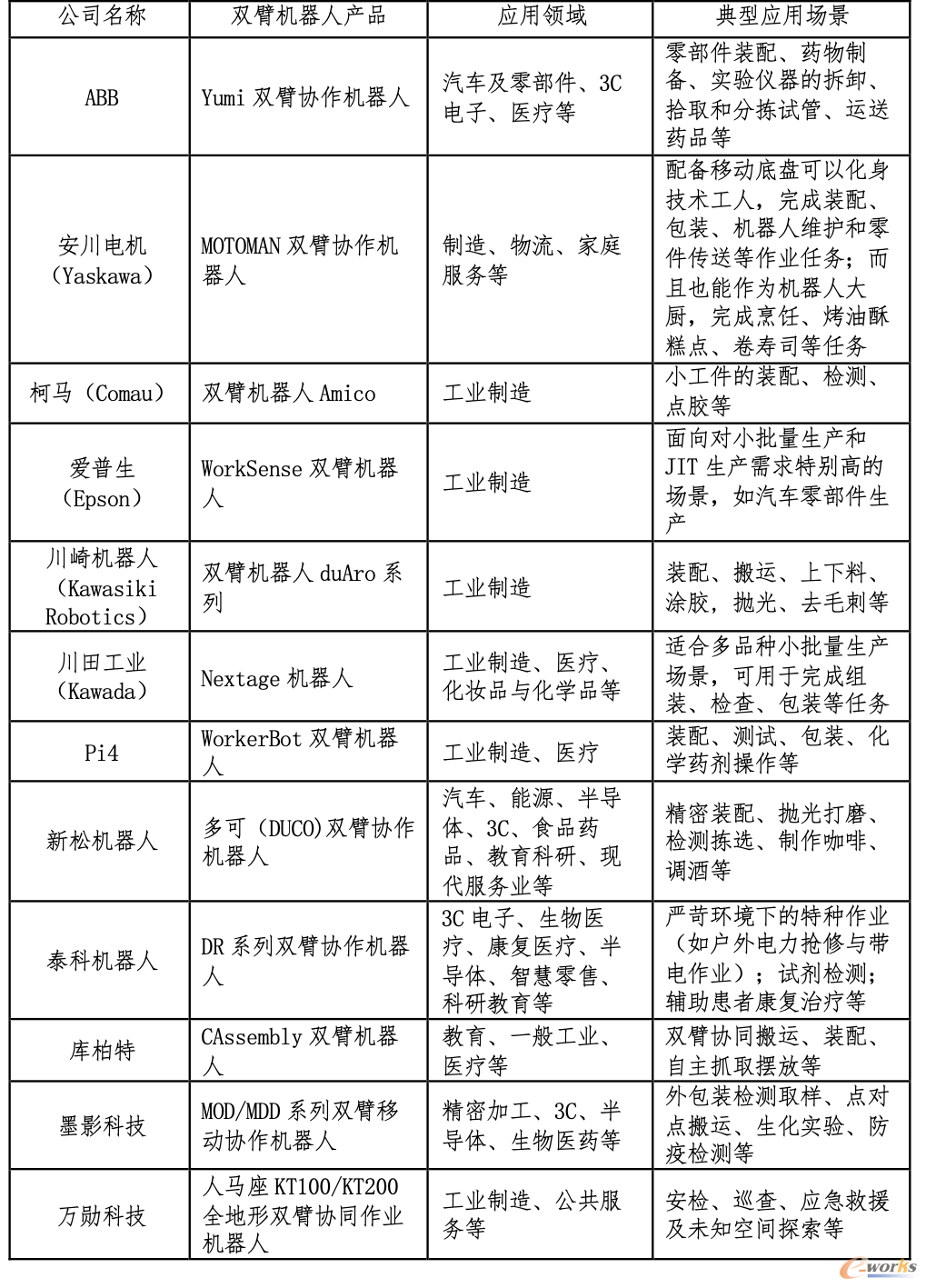
在移动协作机器人方面,目前包括斯坦德机器人、库卡(Kuka)、发那科(Fanuc)、新松、节卡机器人、遨博智能、越疆科技、达明科技、海默机器人、集萃智造、墨影科技等厂商都推出了移动协作机器人产品,并已广泛应用于半导体、机床加工、3C电子、日化制造、电力、餐饮、物流等行业,用于完成不同工序间物料转运与上下料、物料分拣、餐饮和药品配送、电力巡检以及档案管理等工作。
不过,值得关注的是,随着近年来人形机器人的发展进入快车道,且人形机器人与协作机器人存在诸多相似之处,如在设计上都非常注重安全性以确保能够与人类在一起工作,都拥有仿人的上肢,都融入了先进的机器人运动控制和人工智能算法等,这也使得协作机器人厂商纷纷切入人形机器人赛道。据不完全统计,截至目前,基于在协作机器人领域的技术、应用和生态积累,已有Neura Robotics、珞石机器人、节卡机器人、遨博智能、天机机器人、大象机器人、埃斯顿酷卓、睿尔曼智能、里工等多家协作机器人本体制造企业进军人形机器人领域,并推出人形机器人相关产品。
04解构人形机器人
与人体类似,人形机器人也由骨骼、肌肉、上肢、下肢、大脑和神经系统等组成。而要实现对人体的高度复刻,使人形机器人像人一样具备“强健”本体、“智慧”大脑和“敏捷”小脑,涉及到机械、电气、材料、传感、控制、人工智能等多个学科的交叉与融合,并且需要诸多关键技术的支撑。以下是人形机器人各组成部分涉及的关键技术:
1.骨骼:机构与结构
人形机器人的骨骼结构设计涉及仿生学、动力学、机械工程、材料科学等多个领域,目的在于模仿人类骨骼的结构,实现灵活自然的运动。而有机设计(Organic design)则是其中的关键设计理念和技术。
有机设计是以生物体与环境的关系为灵感的设计,它源于自然的设计灵感,采用如细胞、网状、骨骼或晶体等仿生结构,融合3D打印、拓扑优化等先进技术,实现极致性能。这种设计理念和技术,借鉴了自然界中生物体的结构和功能,以实现机器人的高效运动和适应性,对于提高人形机器人的性能和可靠性至关重要。当前,人形机器人的骨骼结构设计的前沿研究方向是实现结构-功能-材料-性能一体化设计。
2.肌肉:核心部组件
在人形机器人结构中,驱动器和执行器在一定程度上可以类比为人类的肌肉。人形机器人的驱动器负责将能源转换为机械运动,就像肌肉收缩产生力量来驱动身体运动一样。根据能量转换方式的不同,驱动方式可分为电机、液压、气动、形状记忆合金驱动、混合驱动(如液电混合驱动)等。人形机器人的执行器则负责将动力转化为具体的动作,类似于人类的肌肉带动骨骼和关节产生各种动作,如抓取、搬运或其他高精度动作等。驱动方式与执行动作的精准协调就像是力量与动作的完美映射,通过驱动方式的选取与执行动作的调控,人形机器人甚至能复现人类的微笑、皱眉、惊讶等表情,从而更加亲切自然地与人类互动。
这其中涉及的关键技术包括运动控制、动力与能源系统等。运动控制涉及到机器人各个关节的精确控制,在硬件上表现为主控芯片、伺服系统等,在软件上表现为运动控制算法,使得机器人能够实现平稳、协调的运动。人形机器人运动控制方法一般涉及步态平衡准则、动力学模型控制框架;随着人工智能技术的发展,运动控制也融入了深度学习与强化学习算法。例如,在2024年世界机器人大会上,浙江人形机器人创新中心展出的人形机器人“领航者2号NAVIAI”在运动控制上有两种方式,一种是基于开源方案优化的非线性模型预测控制和全身控制,另一种则是采用强化学习方式生成机器人的运动和控制策略进行运动控制。
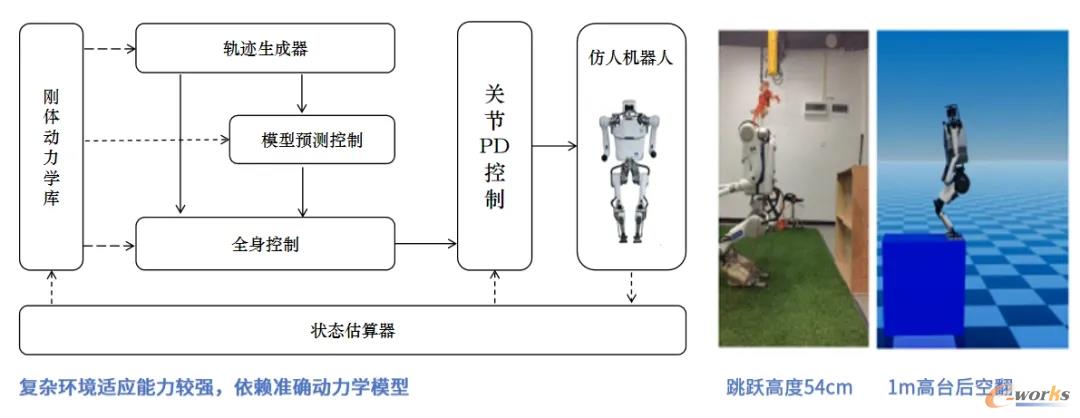
图6 全身协调动力学控制
(图源:浙江大学熊蓉教授《人形机器人研究进展与发展挑战》)
在动力与能源系统方面,由于电驱动成本低、灵活度高、动力强劲,大部分人形机器人都采用基于电机、驱动器和电池的电动关节形式。今年4月,波士顿动力宣布其研发超过10年的液压驱动人形机器人Atlas正式退役,并推出了全电动的Atlas人形机器人。然而,虽然电驱动系统在人形机器人中占据主流地位,但在一些特殊应用领域,如重工业或需要超大力量输出的场合,液压或气动驱动系统仍然有其优势。此外,结合电驱动和其它驱动方式的优点的混合动力系统,在某些高性能的人形机器人中也有应用。

图7 波士顿动力全电动Atlas人形机器人
3.上肢:机械臂、灵巧手
人形机器人的上肢主要由机械臂和灵巧手构成,二者的协同工作使得人形机器人能够模仿人类手臂和手指的灵活性和功能性,在多种环境中完成复杂的作业。这其中,机械臂是人形机器人上肢的主要结构,可以设计为包括一个或多个旋转关节、俯仰关节和滑动关节,以实现多种方向的运动,机械臂的末端通常连接到灵巧手或其它类型的末端执行器,用于完成特定的任务。如今,机械臂已发展得相对成熟。
灵巧手作为人形机器人的核心零部件之一,是人形机器人迈向通用化最核心的技术之一。在机器人技术众多赛道中,灵巧手被称为机器人的“最后的一厘米”。简单理解,灵巧手就是一种新型的机器人末端执行器,是目前最像人手的机械手,用来模仿人类手的复杂动作。灵巧手通常具有多个手指,每个手指都有多个关节,能够独立或协同运动,以抓取和操纵各种形状和大小的物体;而且灵巧手通常还配备有传感器,如力传感器和触觉传感器,使其能够感知并与环境进行交互。作为深度仿生、柔性感知、微机电系统、高性能材料等前沿技术的交叉领域,如今有越来越多的企业进入到灵巧手赛道,并推出了灵巧手产品。此外,近年来人工智能大模型的大规模应用也为灵巧手的研发打开了新路径。为模仿人手的灵巧度,可以通过大量训练人手部动作等数据形成动作相关的大模型,指导更多样、更精细的动作。

图8 智元机器人打造的灵巧手
可以手持工具完成拧螺丝、拆快递、倒水等操作
然而,尽管如今在机器人灵巧手方面已取得了显著进展,但是在场景应用上仍然面临触觉与力反馈、任务规划、复杂操作能力、自适应与自主学习、人机交互、成本与可靠性等挑战,仍需大量科研攻关和技术研发。
4.下肢:动力学、强化学习
人形机器人下肢研究的关键挑战在于实现稳定、高效和自然的行走,这涉及到机械工程、电子工程、控制理论、生物力学和计算机科学等多学科知识的融合。在适应不同需求的过程中,人形机器人演化出了轮式、足式、轮足复合等多种下肢结构。其中,轮式结构可实现高移动速度且耗能低,但越障能力十分有限;足式结构有较高的越障能力,但速度较慢且消耗能量较大,平均制造成本也普遍更高。轮足复合结构结合轮式和双足的特点,采用多个轮子组成的足部结构,在能耗效率、移动速度和负载能力方面相对于其他运动形式和复合移动形式的机器人具有更优异的表现,同时能够高效地在结构或非结构环境中运行。
通过近些年四足机器人的发展,人形机器人在下肢研发方面的进展比较快,其关键技术包括动力学与平衡控制、行为控制等。人形机器人的下肢设计需要考虑其在运动过程中的动力学特性,包括质量分布、关节力矩、关节加速度等,确保在静止站立和行走、跑步等动态运动中保持平衡,不会摔倒。基于模型的离线规划(Model-Based Offline Planning)以及虚实仿真-任务规划一体化软件是动力学研究的重要方向,这些技术的发展有助于提高机器人系统的性能和安全性。机器人行为控制则涉及系统建模与运动控制、感知与反馈、步态生成与优化、地形适应以及故障检测与容错等。在机器人行为控制中,强化学习作为一种常用的方法,发挥着重要的作用,它允许机器人通过与环境的交互来学习最佳的步态参数和控制策略,以实现预期的行为。随着技术的不断发展和完善,强化学习也将越来越多地应用于机器人行为控制。

图9 逐际动力双足机器人P1在英伟达Isaac平台上进行仿真训练
5.大脑:认知与决策
人形机器人的“大脑”承担着类似于人类的复杂认知和决策功能,如环境感知、行为规划、决策制定和人机交互等,是机器人能够进行认知和决策的核心。在技术层面,人形机器人的“大脑”不仅涉及多模态融合感知与环境建模、大规模数据集管理、人工智能算法及大模型的开发与应用,使得人形机器人成为“具身智能”载体,具备学习与适应能力,能够实现对复杂环境的理解,并在复杂环境中进行有效的交互和操作;而且也涉及云边端一体化的计算架构,这意味着人形机器人进行复杂的数据处理和决策,既可以在本地和边缘端进行,也可以利用远程服务器的计算能力。
例如,位于上海的国家地方共建人形机器人创新中心研发的全尺寸开源公版人形机器人“青龙”,拥有“朱雀”具身大脑(模拟人的思维决策过程)和“玄武”小脑模型(模仿生物的复杂运动控制)。其中,“朱雀”具身大脑是一个以多模态大模型为核心的机器人指挥调度中心,利用多模态大模型的感知能力、任务理解能力、记忆能力以及规划能力,帮助机器人完成任务;它以文字和图像信息作为输入,支持语音交互,最终将任务决策信息输出给“玄武”小脑模型。目前,开普勒人形机器人采用端侧具身智能小模型与云端大模型结合的部署方式,通过分层端到端的设计,在充分利用本地计算资源保证实时响应的同时,利用云端的大模型和计算能力处理更复杂的数据和决策,实现特定任务的高实时性、高准确率、高安全性的自主运动与作业。
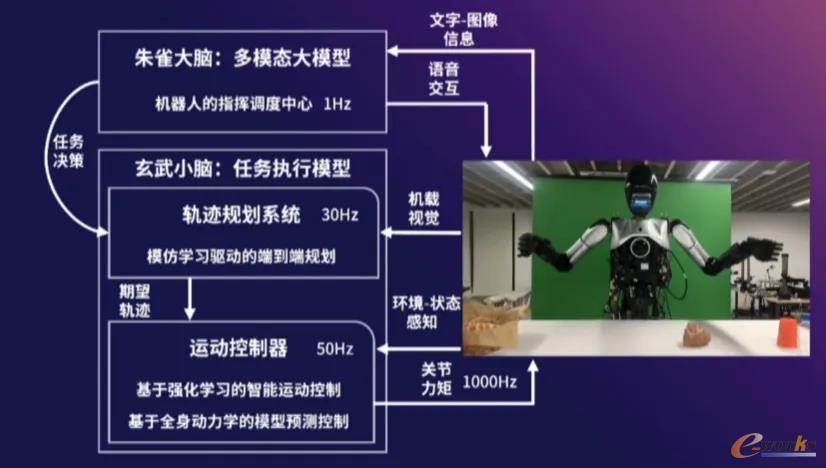
图10 人形机器人“青龙”的“大脑”和“小脑”
6.神经系统:感知与融合
人形机器人神经系统的主要任务是感知外部环境并对数据进行处理,以支持智能决策的制定。人形机器人需要具备类似人类的感知能力,融合视觉、听觉、触觉等多种感知方式,实现多源异构信息融合感知,以更全面、准确地理解和适应周围环境。而实现高效感知的关键在于先进的传感器技术和强大的数据处理能力。
目前,在感知与融合方面,一些人形机器人厂商已取得显著进展。例如,为了像人一样理解和感知物理世界,Figure AI的第二代人形机器人Figure 02在头部、前躯干和后躯干共配备了6个RGB摄像头,并通过多摄像头结合AI驱动的视觉系统进行感知与推理。Figure 02的导航系统则使用了视觉语言模型(VLM),这使得机器人搭载的摄像头能够进行语义基础研究和快速常识性视觉推理。而且,与初代版本一样,Figure 02也能够在OpenAI定制的AI模型加持下,通过内置的麦克风和扬声器与人类进行对话。据介绍,Figure 02的计算和AI推理能力,相较于初代版本提升了3倍。特斯拉的Optimus人形机器人搭载了2D视觉传感器和与特斯拉汽车相同的完全自动驾驶(FSD)技术以及Autopilot相关神经网络技术,能够实时感知周围环境并精确处理数据,实现了端到端的自主感知与导航。

图11 特斯拉人形机器人“擎天柱”2代
总的来说,人形机器人的研发涉及材料与结构设计、运动控制、认知与决策、感知与融合、人机交互、能源与动力系统、人工智能与智能计算等多个领域的关键技术。这些关键技术的创新与突破,是人形机器人不断发展和广泛应用的基础。
05 解锁无限可能
与传统的工业机器人相比,人形机器人具有通用性好、柔性高等优点,适合低精度、低负载、高柔性、高协作、复杂多任务的场景,在工业制造、智慧物流、公共服务、家庭服务、太空开发以及军事等领域都有着广阔的应用潜力与前景。
在工业制造领域,如今人形机器人已进入到汽车、3C家电等行业的制造工厂实训,成为工厂的“新打工人”。例如,包括特斯拉、优必选科技、Figure AI、Apptronik、乐聚机器人等厂商都已将自家的人形机器人送入汽车工厂进行实训。综合来看,搬运和装配汽车部件、拧紧螺栓、分拣电芯、车门锁质检、安全带检测、车灯盖板质检、贴车标等,是人形机器人在汽车工厂的主要实训内容。在家电行业,由中国兵器装备集团自动化研究所与长虹公司联合研制的全尺寸仿生人形机器人,已在长虹智能制造产业园上岗,进行物料搬运和扫码贴签等工作。此外,人形机机器人也可用于辅助和代替人完成工厂巡检任务。

图12 优必选人形机器人Walker S在东风柳汽总装车间实训(图源:优必选科技)
在智慧物流领域,早在2019年5月,Agility Robotics便与福特汽车公司建立了合作伙伴关系,共同开发“最后一英里”无人物流解决方案。该方案结合了福特的自动驾驶汽车技术和 Agility Robotics的双足机器人Digit,Digit被放在自动驾驶送货车的后面,在最后一英里时由Digit将包裹放在客户门口。2023年10月, Agility Robotics进一步与亚马逊合作,其Digit人形机器人被用于在亚马逊位于西雅图南部的物流中心中搬运仓库中的手提袋和包裹。2023年12月,全球最大的第三方合同物流供应商GXO Logistics也宣布引入Digit在位于佐治亚州Flowery Branch的SPANX仓库进行物流任务测试。

图13 在GXO Spanx仓库“打工”的人形机器人Digit
在公共服务领域,日立公司早在2016年就开发了可自行从事接待及引导服务的人形机器人EMIEW3。EMIEW3除了会自主发现需要帮助的顾客并提供服务外,还能进行信息共享及服务交接,即使摔倒也能自动重新站立,实现高效的接待引导服务。而且,在医院和养老院中辅助医护人员进行监测患者生命体征、搬运物品等基本的护理工作;在图书馆提供图书检索、借阅、归还等服务;在博物馆担任导览员,提供展品介绍和导览服务;在电影院、剧院等娱乐场所提供售票、检票、餐饮等服务;在地铁站、火车站、机场等交通枢纽用于提供乘客咨询、指引路线、行李搬运等服务;在公共场所用于治安巡逻以及紧急情况下的搜索与救援等等,这些也都是人形机器人可落地的潜在应用场景。

图14 人形机器人“夸父”3.0在街头当“文明交通劝导员”(图源:封面新闻)
在家庭服务领域,人形机器人既可以用于儿童看护、辅助儿童学习、与儿童进行简单的游戏互动,也可以用来陪伴孤独的老人,提供健康监测、生活辅助、用药提醒以及心理慰藉等。此外,在一些人形机器人厂商的演示视频中,也展现了人形机器人在熨衣服、叠衣服、整理书架等多个场景的作业能力,这意味着人形机器人可以用于处理家务,扮演管家或保姆的角色。

图15 星尘智能Astribot S1人形机器人展示叠衣服技能
在太空开发领域,人形机器人既可在空间站内部作为宇航员的得力助手,承担监测环境、维护设备、进行实验等重复性或危险性工作,减轻宇航员的工作负担;也可用于在空间站外部安装或维护外部设备,亦或是参与太空垃圾清理任务;而且在更为广阔的外太空探索方面,人形机器人也能够用于在极端环境下开展科学探测和研究,执行地表探测、样本采集等任务。
事实上,美国和俄罗斯等国家的航天部门早已着手开展将人形机器人用于太空探索的研究。例如,早在2011年,美国国家航空航天局(NASA)就将与通用汽车合作开发的Robonaut 2人形机器人送入国际空间站,成为太空中的首个人形机器人。2013年,NASA推出了绰号为“女武神”的Valkyrie(R5)人形机器人,该机器人开发于美国约翰逊航天中心,是DARPA发起的“机器人挑战赛”的设计作品之一,它能够不受限制地移动,NASA对它寄予厚望,希望它能够在太空探索中发挥重要作用,例如执行火星殖民等任务。2019年,俄罗斯Skybot F-850钢骨版人形机器人搭乘联盟号MS-14飞船进入国际空间站,它的加入标志着仿真人形机器人在太空领域的实际应用又迈出了一大步。Skybot F-850机器人的设计旨在应对太空环境中的各种复杂情况,其高度的人形特征使其在处理多种任务时更加灵活和高效。它的设计包括多个传感器和自由度高的四肢,使其能够在空间站内进行多种操作和活动。

图16 Valkyrie(R5)人形机器人(图源:NASA)
在军事领域,人形机器人不仅可以用于代替一线作战的士兵执行战斗任务,也可用于物资搬运、战场清理、维修和保养装备,有效降低士兵的工作强度。而且,在伤员救援任务中,人形机器人同样可以发挥关键作用,将伤员运送至安全区域,减少救援人员的工作压力。此外,由于不受生理因素的限制,人形机器人也能在高温、低温、高海拔、有毒等极端环境中代替士兵执行排雷、侦查和攻击等高风险任务。
总之,人形机器人结合了人类的身体结构和机器的功能性,这使得它们在多个领域都具有独特的优势和应用潜力。未来随着关键技术的持续突破,如人形机器人运动性能和智能化水平不断提升,以及生产成本的降低,人形机器人有望在更多领域和场景实现集群化和规模化应用。
06 结语
人形机器人是机器人技术的集大成者和制高点,是机器人领域的重要分支。研发人形机器人的目的是改变如今的机器人只能完成一些简单作业和任务的局面,使机器人具备通用性和泛化性,能够从封闭环境走向开放空间,像人一样具有灵活操作、人机交互、决策与推理的智能化能力,可以完成高柔性、高协作、复杂流程的任务。当前人形机器人的发展主要呈现三大特点与趋势:一是人形机器人技术路线及其演进路径已逐渐清晰;二是人形机器人被认为是具身智能的重要载体,人工智能技术与人形机器人的结合,正推动人形机器人的智能化水平不断提升;三是人形机器人技术正逐步从实验室走向实际应用,其商业化进程正在加速。
然而,当前人形机器人的发展仍然面临着多方面的挑战,这包括:人形机器人在机械设计与运动控制、感知与融合、智能决策与规划、人机交互等关键技术以及电机、减速器、控制器、驱动器、灵巧手等核心零部件上仍有待进一步突破,以适应多样化的任务需求;当前人形机器人离场景应用尚有距离,仍需大量科研攻关和实践验证;人形机器人的生产制造成本仍然较高,限制了规模化推广与应用;AI算法和实时系统响应等方面的需求催生了对强大算力的需求,现阶段的计算能力面临巨大挑战;人形机器人的训练缺乏高质量的数据集,且训练成本高、效率低等等。这些都需要长期的耐心和持续的投入。此外,在推动人形机器人的规模化应用过程中,也需要处理好标准规范、安全与隐私、人才、法律法规与道德伦理等方面的问题。
不过,我们也要看到,人形机器人与传统机器人相比更具优势,而且我国多元化的产业生态、多样化的消费场景、广阔的市场空间与潜力,以及大模型等技术的赋能,为推动人形机器人的快速发展提供了必要条件。虽然推动人形机器人规模化量产与应用,将是一个长期而漫长的过程,但相信在各方的共同努力之下,未来人形机器人走入大众生活,成为人类的“好帮手”,或将成为可能。
参考资料
1.丁汉、陶波:探索人形机器人的奥秘
https://mp.weixin.qq.com/s/EKpGdS4VKunTzoKs56Lx_A
2.钢铁侠科技.人形机器人发展历程
https://mp.weixin.qq.com/s/cf7Chv9jdSkICajRxsiwWA
3.人形机器人发展动向、趋势研判及有关建议
https://mp.weixin.qq.com/s/gFxBam38FTnh06nSEvEibg
4.机器人的前世今生(一):古代机器人
https://mp.weixin.qq.com/s/wQuXSkTXi-6fnEjKIeTzBw
5.从偃师人偶到擎天柱:人形机器人的前世今生
https://www.eeo.com.cn/2023/0905/604205.shtml
6.邱剑敏.人形机器人的“大脑”和小脑
https://mp.weixin.qq.com/s/6Z4Q-w6aVGFl8BzTwZcfUw
7.人形机器人在这四个场景大有可为
https://mp.weixin.qq.com/s/AsVjG7v8wR6_YAFjB4a-lg
8.人形机器人的研究发展与挑战
https://www.caa.org.cn/article/345/4512.html
本文为e-works原创投稿文章,未经e-works书面许可,任何人不得复制、转载、摘编等任何方式进行使用。如已是e-works授权合作伙伴,应在授权范围内使用。e-works内容合作伙伴申请热线:editor@e-works.net.cn tel:027-87592219/20/21。
 文章
文章
